Project
I Want To Survive
AI-driven simulation built in Unity, focused on autonomous agents, survival behavior, hierarchical pathfinding, and procedural world expansion.
I Want To Survive is a simulation project centered around autonomous NPCs whose goal is to survive by exploring the environment, locating food, and managing limited energy resources. The project combines AI behavior systems, dynamic world generation, and scalable navigation logic in a growing environment.
My Contributions
- Implemented NPC behavior logic using a Finite State Machine (FSM)
- Developed procedural environment expansion through dynamically generated map fragments
- Implemented hierarchical pathfinding using an HPA* architecture
- Built local and global graph generation systems for scalable navigation
- Developed survival systems based on energy consumption, food acquisition, and perception
- Integrated debugging and analysis tools including graph visualization and path rendering
AI Behavior
Each NPC is driven by a Finite State Machine built around states such as idle, exploration, path planning, movement toward food, eating, resting, and dying. State transitions depend on sensory input, energy thresholds, path availability, and internal memory, allowing agents to react dynamically while remaining predictable and debuggable.
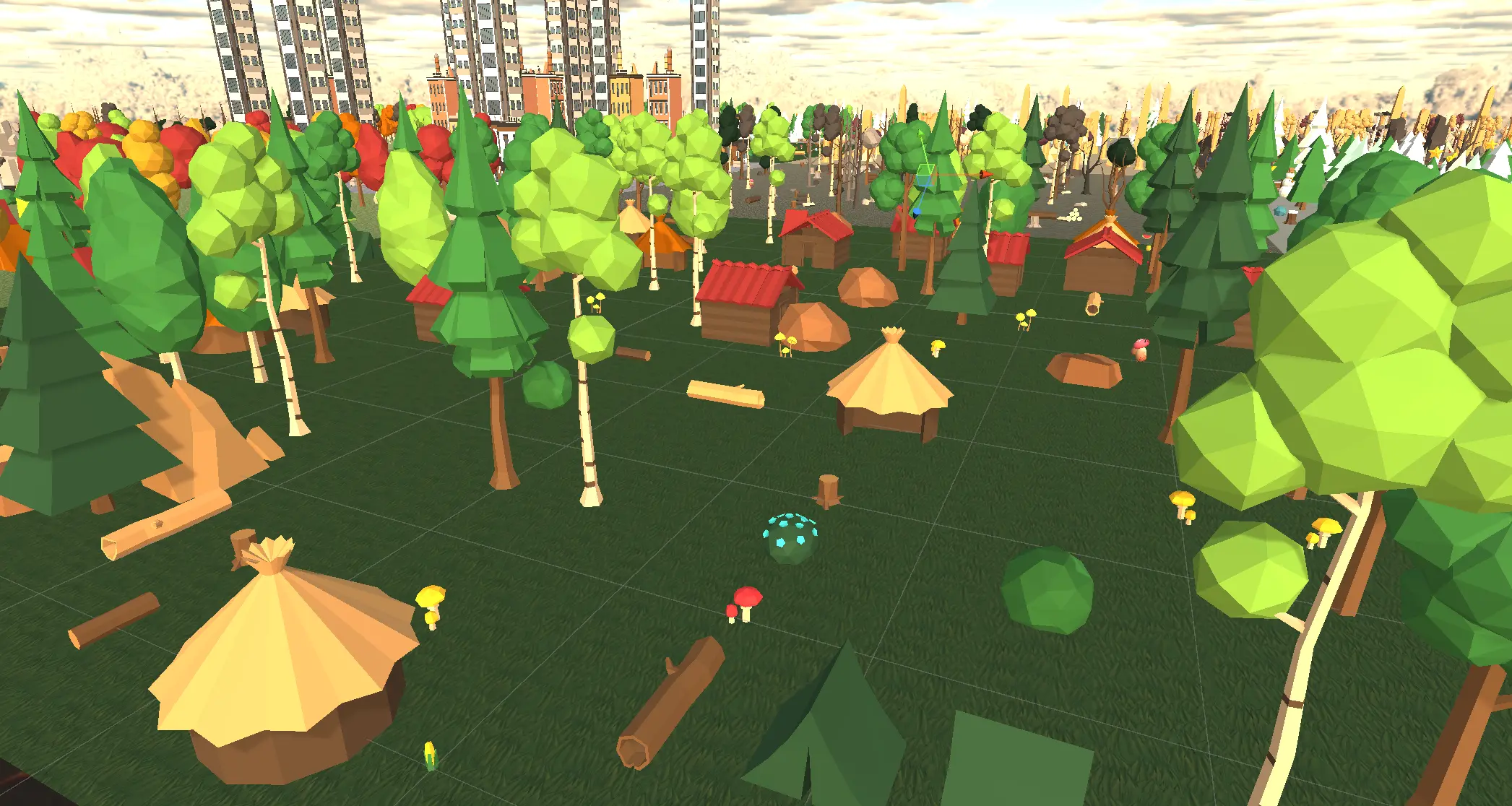
World Generation & Navigation
The environment is generated procedurally through interconnected map fragments, each represented as a grid-based graph. As NPCs explore the world, new fragments are generated on demand and merged into a larger navigation structure. To keep pathfinding efficient, the project uses a Hierarchical Pathfinding A* approach, combining local path computation with abstract graph traversal across the expanding world.
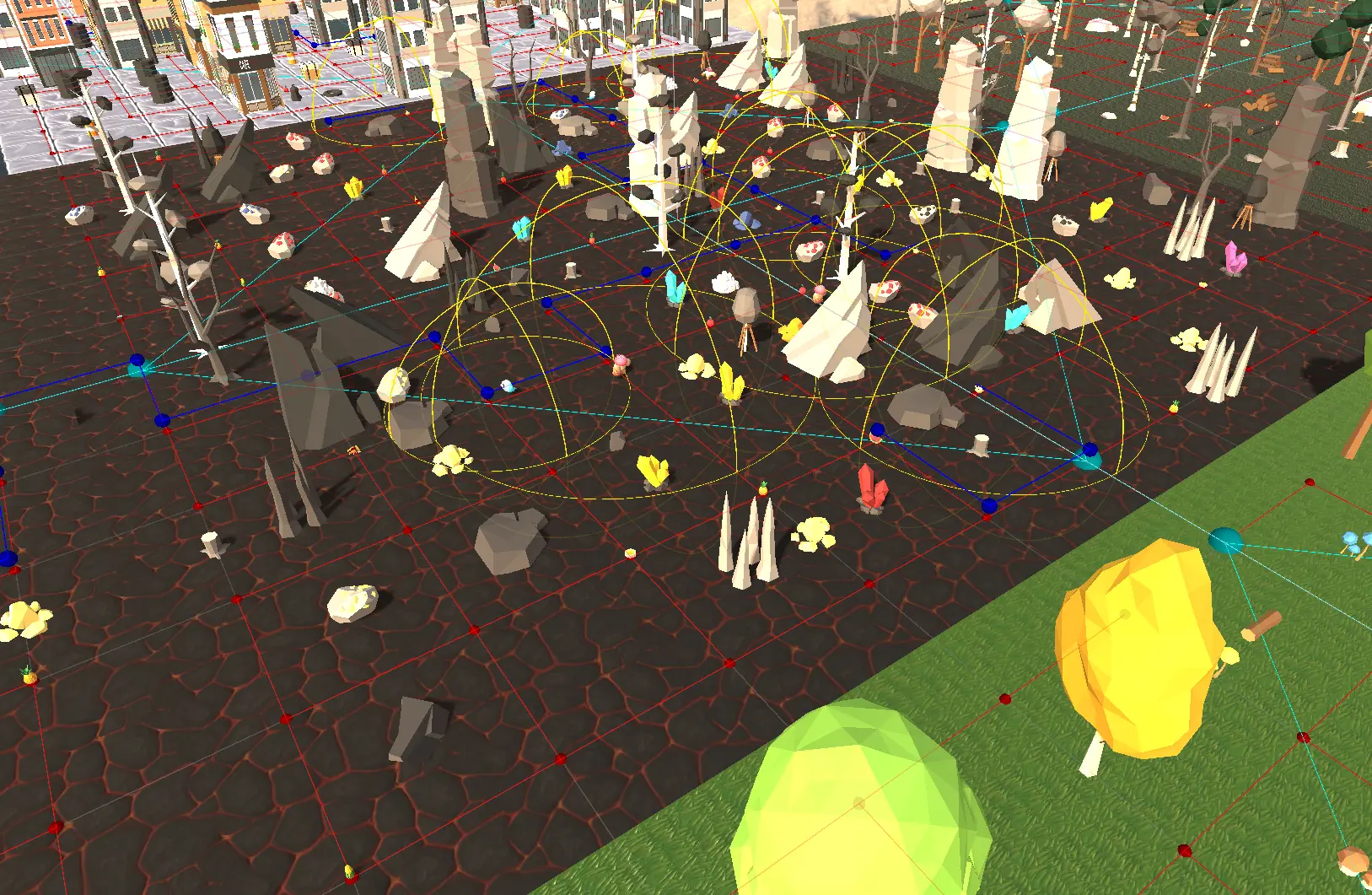
Debugging & Analysis Tools
The project includes gizmo-based graph visualization, path rendering, and camera switching between NPCs to support debugging, tuning, and behavior analysis. These tools were important for validating both agent decisions and navigation quality during simulation runs.


Use arrows to browse media